In this project, I designed and built a simple functioning robotic arm using 3D-printed components and three micro servo motors.

The arm is powered by an Arduino Uno, which controls the movements of three servo motors to achieve precise and smooth motion.
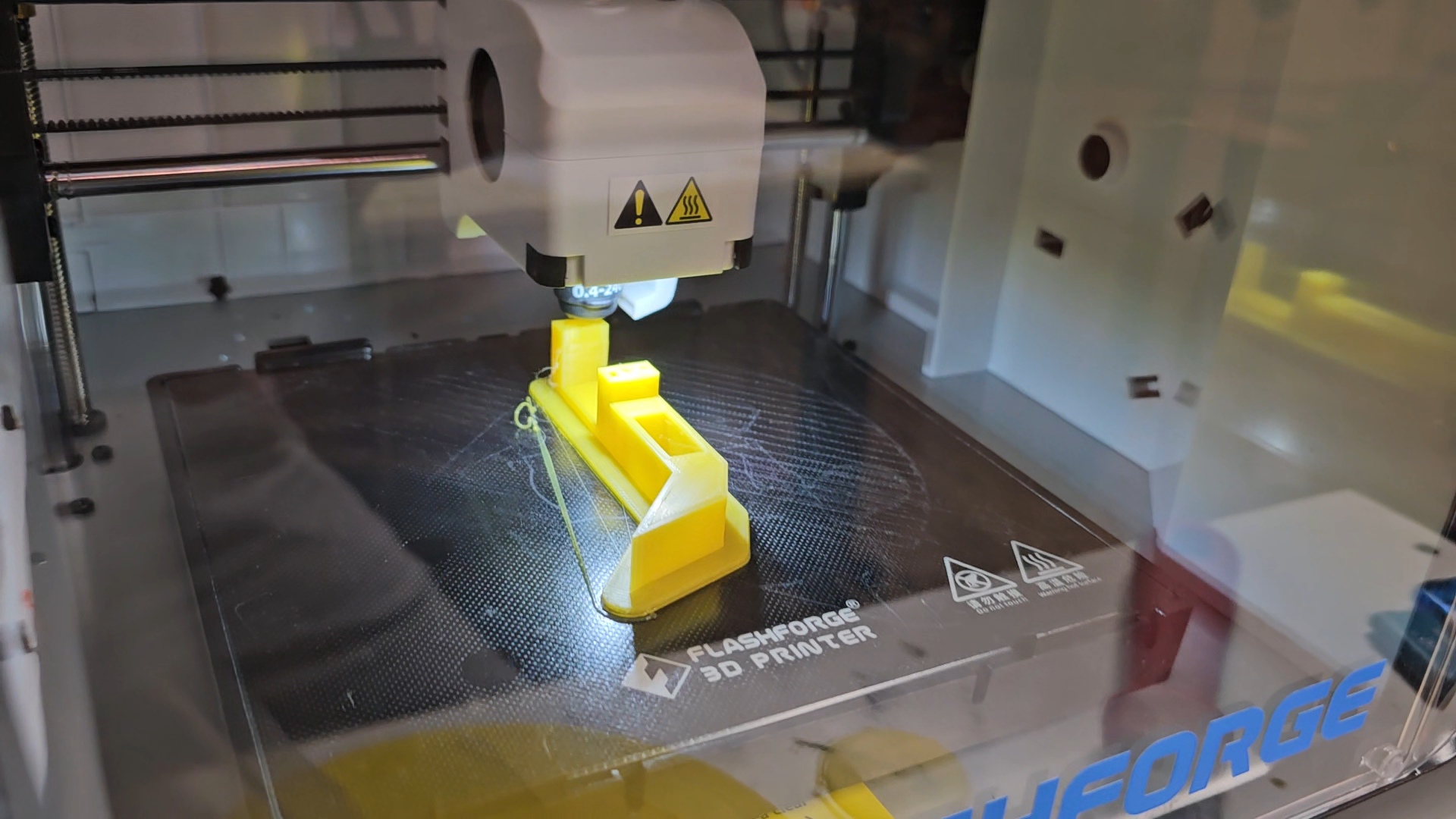
The project involved creating a detailed 3D model of the robotic arm using Tinkercad, which was then printed using a 3D printer.
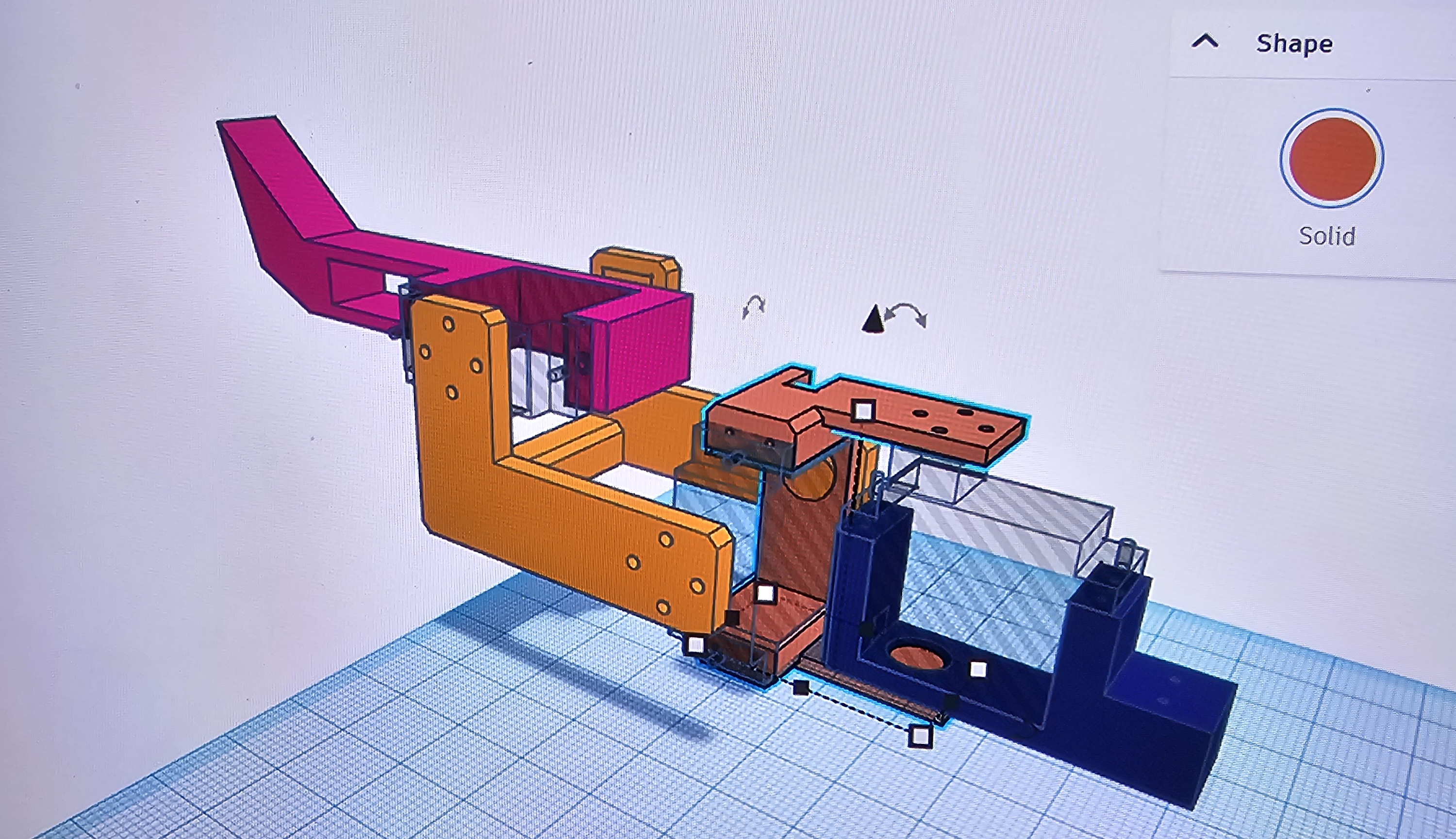
The design was iteratively refined to ensure optimal movement and stability.
Each servo motor was programmed to move in specific ranges, with one motor handling the base rotation and the others controlling the arm's elevation. The coding was done using the Arduino IDE, where I wrote the logic to control the synchronized movement of the motors, creating a fluid and responsive arm motion.
Total time: 12 hours